Robotics
Today we made a five minute bot with legos and sensor.
Today we are making the robot move around if the touch sensor is press the bot turns off and sonar gets samples.
We made a program to stop the robot when it hits something and try not to get hit.Something did not work in the program like the color sensor.
This is my what I came up with.
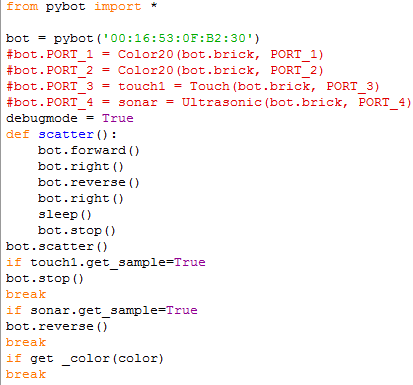
The first time I tested the program some thing did not work.
Today we are finishing up are codes for the robots.
Today was the day that the robots where tested with other robots.
We learned algorithm by play this game where you organising coins by there weight also different comparing methods.
Home